Embedded GPS navigation system design
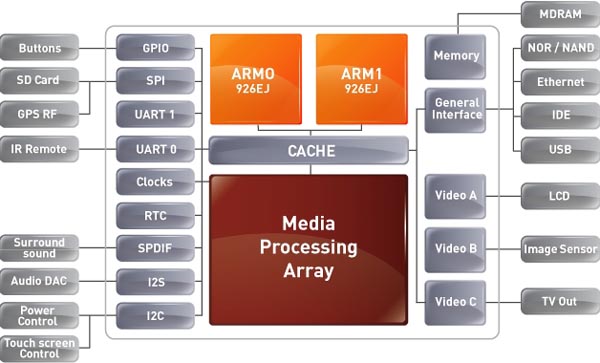
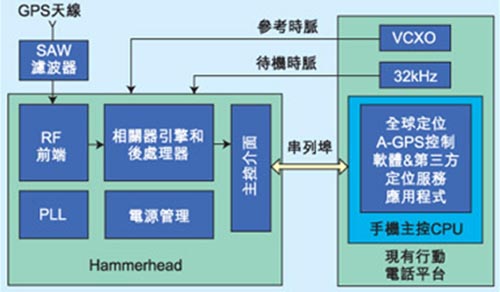
As the technologicalization continues to accelerate, more and more people are forced to work in a compact time and place. When the speed of urbanization continues to expand, it not only leads to the increasingly complex transportation network, but also the mobility necessary. There are also more and more frequent trends. This article refers to the address: http:// Everyone has more reliance on spatial information, which makes people have an unprecedented demand for "Where am I?", "Going to the destination?", "How to get there?" Therefore, the digital geo-integration application with embedded system as the main platform and its corresponding solution, namely handheld and in-vehicle GPS global satellite navigation system, can solve the urgent need for this. Caption: The additional functions continue to show a high degree of expansion. In the past, the car navigation system did not require AM/FM radio, DVD/VCD audio and video system, CD/MP3 player, or a sound system with voice navigation, and a memory for storing maps. And many other features. Embedded GPS navigation system embodies optimized navigation system Today, the application of GPS satellite navigation and positioning has become more and more popular, but most people's understanding of it is still limited to the use of driving navigation, but for a wide range of application markets, the application of vehicle-mounted GPS is only the beginning, in fact it is In the fields of national defense, geographic information and construction engineering, it is an indispensable and important technology. In the next step, GPS will enter everyone's life and become a GPS mobile phone or handheld navigation device (PND). This can be seen from the core technology of the embedded GPS navigation system. Take the 16/32-bit RISC processor S3C2410A chip in the Samsung ARM9 series as an example. The chip's powerful real-time processing capability and rich peripheral interface are very suitable for embedded systems. Developed, and the system is designed based on these characteristics of the chip. The system is based on the S3C2410A microprocessor and is integrated into two 32M SDRAMs (HY57V561620CT) and 64M NAND Flash (K9F1208U0B) as the smallest system. In addition, GPS is installed outside the system for GPS signals. Module, LCD panel for display, and voice chip system for UDA1341TS. Establishing a system platform to improve architecture compatibility is the main goal Mainly, the establishment of its system platform architecture can be subdivided into two main parts, namely the selection of the operating system of the host computer host and the establishment of the cross-editing device and tool chain. On a computer's mainframe, its operating system can have a variety of options, including: installing a Linux distribution, using a virtual machine under Windows, or using Cygwin. Because Microsoft Windows now dominates more than half of the world's computer systems, and many developers are using virtual machines and other means to implement embedded Linux development under the Windows platform, but these methods will bring more or less compatibility issues. . The best option for developing embedded Linux is to install a Linux distribution on the host computer. Because it has nothing to do with Windows, it can take up all the resources of the system, with the highest performance and best compatibility. Secondly, in terms of building a tool chain for cross-editing devices, one must pay attention to the choice of the computer operating system. The currently available runtime systems are glibc, uClibc, and newlib. Glibc is a standard system provided by the GNU project. Because it is mainly designed for computers, the main architecture is huge, but it can provide the best compatibility. If the general embedded development can choose uClibc, and uClibc is originally a C language library in the uCLinux development process, it is now independent of the uCLinux project and further improved. It rewrites most of glibc's functions, and the target is embedded, so it's much smaller than glibc. In addition, because its function is consistent with glibc, so many of the software originally developed based on glibc basically do not need to be changed, so that uClibc can be optimized in the process of editing, making the memory and disk space occupied by the embedded system more Less, but because it is not a standard operating system, uClibc has certain compatibility issues. Caption: GPS navigation devices used on different devices, such as handheld navigation devices or embedded GPS navigation architectures on cars, are the areas of use that must be confirmed before selecting the appropriate hardware architecture. Positioning direction. () GPS navigation application software is related to the advantages and disadvantages of navigation systems Basically, the software function is also one of the important keys to determine the quality of the navigation system; the first is the choice of the operating system. Because it is an in-vehicle embedded system, the reliability requirements of the car factory for the built-in equipment are much higher than those of the consumer or home equipment system. As the operating system of the main computer of the navigation system, and using buildroot and crosstool respectively, two cross-editing device tool chains with different running systems are built. Since system development requires U-Boot's TFTP function to download the Linux kernel and Linux's NFS network file system, you first need to set up TFTP and NFS for Fedora Core 5, and then you need to set up an interface communication software to interact with the development platform. Therefore, the Kermit protocol can be used for the selection of data transmission. The main reason for using the cross-editor toolchain of 2 different runtime systems is that the navigation application uses uClibc for compatibility issues, so glibc has to be used, and in order to reduce the resource consumption, U-Boot, Linux kernel and Busybox still use Is uClibc. After the system platform is established, the Linux operating system provides the underlying operations, including: file system management, memory allocation, and basic flash memory burning, but does not provide the best display interface, and at the same time In order to reflect the display and navigation functions of geographic data, it is necessary to put a graphical user interface support system and a geographic information development platform on the operating system. The entire software system relies on the messages sent by different windows or control components to perform a variety of navigation system functions. After the main window is created, the mGIS control can be registered, which can conveniently implement some common map operations. After the main window is created, many will be created for the sub-window, including: for displaying the latitude and longitude information of the map, time. Finally, in the static function of speed, it can be used to implement a quick and convenient toolbar, which is used to implement the menu bar of GPS function shutdown and map data loading. Caption: Circuit diagram of the handheld GPS system. The application range of GPS is very wide, and it must have its selling point in the market. However, there are still many bottlenecks that need to be broken in order to make GPS into mobile phones. The GPS application of the mobile phone is very different from the car navigation. The former requires accurate positioning information in the walking environment, and the mobile phone user often is in the indoor or the lane where the reception is poor. () "Find My Way" is the ultimate goal of GPS satellite navigation Find My Way embedded mobile map navigation system has basic functions after initial design, implementation and application verification, which can initially meet the needs of personal mobile navigation information systems. It can complete the functions of loading, zooming, dragging, searching, simple navigation, ranging, GPS function opening and closing of digital maps. At the same time, it is necessary to make a more feasible vector map production method, which can complete the production of map data source and the addition of related information more quickly depending on the occasions used, and has certain expansion capabilities. Of course, due to the limited time and ability, this product also has its own shortcomings, which deserves further in-depth research. For example, after opening the GPS receiver module, the response speed of the system will be significantly reduced, although already for the Linux kernel and editor. After an appropriate optimization process, the situation has not improved significantly. The problem may be that the processing speed of the hardware platform and the callable resources are limited, and the program structure on the software reception may be unreasonable and excessively nested. GPS receiving signals sometimes have unstable signal reception, and signal offsets occur, exceeding the nominal error value. The problem may be that the signal lines are not equidistant in the design circuit of the development platform, and the signal isolation and protection bands are not set, resulting in an undue error. But starting from the software, how to correct such errors is also a direction worth studying. However, in this article, only fixed-point navigation is described, and navigation from any point to any point cannot be completed. The navigation function can continue to be deep from the software aspect. Research, including the choice of map formats, etc., are issues and challenges that must be faced in the future. Wire Feeding Roller is part of the spraying system. Wire Feeding Roller Wire Feeding Roller,Welding Wire Feed Roller,Wire Feeder Roller,Wire Feed Drive Roller Shaoxing Tianlong Tin Materials Co.,Ltd. , https://www.tianlongspray.com