[Depth] What are the obstacle avoidance methods for mobile robots before implementing autonomous navigation?
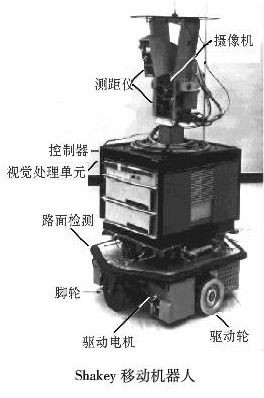
Mobile robots are an important research field for robots, and people have begun research on mobile robots very early. The world's first truly mobile robot was developed by Stanford Research Institute (SRI)'s Artificial Intelligence Center from 1966 to 1972. It is called Shakey. It is equipped with a TV camera, a triangometer, a collision sensor, and a drive. The motor and encoder are controlled by two computers via a wireless communication system for simple autonomous navigation. Shakey's development process also gave birth to two classic navigation algorithms: the Asearch algorithm and the visibility graph method. Although Shakey can only solve simple perception, motion planning and control problems, it is the most successful research platform for applying AI to robots at the time. It confirms many serious ones that are usually in the field of artificial intelligence (AI). Scientific conclusions. Since the end of the 1970s, with the development of computer applications and sensing technology, as well as the continuous introduction of new robot navigation algorithms, mobile robot research has begun to enter the fast lane. An important sign of mobile robot intelligence is autonomous navigation, and there is a basic requirement for robot autonomous navigation - obstacle avoidance. Let us take a look at the obstacle avoidance of mobile robots. Obstacle avoidance refers to the mobile robots according to the state information of the obstacles collected, and when the sensors sense the static and dynamic objects that hinder their passage during the walking process, according to certain methods. Effectively avoid obstacles and finally reach the target point. The necessary condition for obstacle avoidance and navigation is environmental awareness. In an unknown or partially unknown environment, obstacle avoidance needs to obtain information about surrounding environment through sensors, including the size, shape and position of obstacles. Therefore, sensor technology avoids mobile robots. The barrier plays a very important role. Sensors for obstacle avoidance mainly include ultrasonic sensors, visual sensors, infrared sensors, and laser sensors. Common sensors for mobile robots to avoid obstacles 1, laser sensor The laser ranging sensor uses a laser to measure parameters such as the distance to the measured object or the displacement of the measured object. The more commonly used ranging method is to emit a pulse laser with a very short duration by a pulsed laser. After passing the distance to be measured, it is shot at the target to be measured, and the echo returns and is received by the photodetector. According to the interval between the main wave signal and the echo signal, that is, the round trip time between the laser pulse and the target to be measured, the distance of the target to be measured can be calculated. Due to the fast speed of light, the beam round-trip time is extremely short when measuring small distances. Therefore, this method is not suitable for measurement (sub-millimeter) distances. Generally, if the accuracy is very high, triangulation, phase method, etc. are commonly used. Method measurement. door opener keychain no touch,no touch keychain,no touch tool keychain,no touch keychain bulk, no touch keychain wholesale Shenzhen Konchang Electronic Technology Co.,Ltd , https://www.eclinusb.com