Application of Data Fusion Technology in Vehicle Shaft Identification System
Abstract: In order to design a high-reliability and stability shaft type identification system, it provides an accurate charging basis for highway toll collection and reduces the maintenance cost of the wheel detector. The vehicle axle type identification system for highway toll collection is carried out. the study. The axis characteristics and recognition principle of the axle single/double wheel and various common vehicles are analyzed. It is proposed to use data fusion technology in the weighing instrument to collect data from the axle recognizer, weighing platform, axle weight, grating and expert system. The fusion is performed to comprehensively judge the vehicle axis type, and finally the correct shaft type code is given. Field tests show that the system can guarantee more than 99% recognition rate when all parts are working normally, and can guarantee more than 97% recognition rate when the wheel detector is damaged. This article refers to the address: http:// DIN Electric Bell Low Voltage Electrical,Electric Bell,Patent Intermittent Electric Bell Wenzhou Korlen Electric Appliances Co., Ltd. , http://www.korlenelectric.com
Keywords: data fusion; axis recognition system; expert system; axial type
The dynamic truck scale is the main device in the highway toll collection. The shaft type identification is to identify and encode the shaft type of each axle of the traveling vehicle, including the single/double wheel and coupling information of the axle. The shaft type identification system is responsible for the shaft type coding of the entire vehicle, and mainly provides an important charging basis for the weighting and charging. It includes the integrated processing of the axle recognizer and the meter. Wheel axle recognizers are widely used in highway toll collection and road inspection and over-limit vehicle detection. There are two main types of products used in actual engineering: one is the use of switchgear, which is easy to cause rainwater and sand dust to invade for a long time, which is easy to cause equipment damage; the other is the use of pressure sensors. Although these two wheel axle identifiers are widely used, they all have typical common shortcomings - complicated installation, high failure rate and high maintenance cost.
This paper proposes to use the multi-sensor data fusion technology in the weighing instrument to take the shaft load identification characteristics of the axle recognizer, the carrier (weighing platform), the grating (vehicle separator) and various vehicles. Expert system experience and other data are combined to improve the accuracy and stability of the shaft type identification, and ensure that there is still a high recognition rate in the fault state of the axle recognizer.
1 System components Vehicle dynamic truck scale is mainly composed of weighing platform and weighing instrument. It is equipped with vehicle separator (grating) and vehicle axle detector as shown in Figure 1 to complete the axle weight of the vehicle, the vehicle weight and the number of tires. , tire width, vehicle axle set, vehicle axle type, vehicle speed, vehicle acceleration, and transit time and overrun detection. 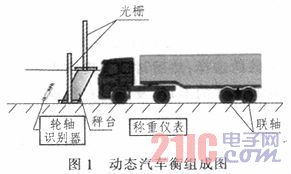
The shaft type identification system is an important functional unit of the dynamic truck scale. It consists of an axle identifier, a weighing platform, a weighing instrument and a grating. The core of the system control is the weighing instrument. The weighing instrument combines data from the axle recognizer, weighing platform, grating and expert system experience to obtain shaft type coding information for passing vehicles. The block diagram of the system is shown in Figure 2. 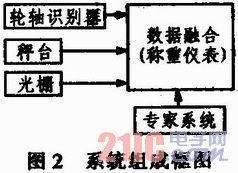
1.1 Axle identifier The axle recognizer is used to measure the single/double wheel and the presence/absence of the axle of the axle. It is fixed by a row of detection devices (pressure sensors or switchgear, near the road scale). The sensor is taken as an example) and the axle recognition circuit is constructed (as shown in Figure 3). The single/double tire (coded at 1/2) of the axle wheel is determined according to the number and condition of the tire pressure sensor when the axle passes. 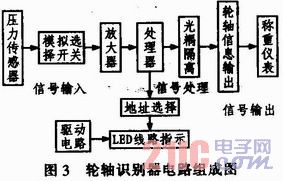
The circuit structure of the axle recognizer is mainly composed of a signal acquisition module, a signal processing module and a signal output module (as shown in FIG. 3). The analog switch CD4067 can be used to time-multiplex multiple sensor signals into the processor for processing. The STC12C2052AD is selected as a processor with eight 8-bit high-accuracy high-speed A/D converters with a speed of up to 100 kHz to save hardware circuit overhead.
1.2 Weighing platform The weighing platform cooperates with the Yan axis identifier to judge the coupling. On the other hand, it can judge the running direction of the shaft to ensure the synchronization of the axis number of the military and its shaft type.
In the axle structure of the vehicle, when the wheelbase between two axes is about 1 300 mm, the two shafts can be considered to form a coupling, as shown in Figure 1 (third to fourth from left to right) Form the second axis). When the coupling of the vehicle passes through the weighing platform, the two shafts constituting the coupling will simultaneously apply the respective loads to the sensors and the weighing platform of the wheel detector due to the short distance. By detecting the synchronism of these two signals, it can be judged whether the shaft type is a coupling.
1.3 Gratings Gratings, also known as vehicle separators, consist of a transmitter and a receiver. When the vehicle passes, the light-receiving road is blocked, and the vehicle passes through the rear light path to resume unblocking and is finished by the weighing instrument. In the shaft type identification system, it can be used as the command information for combining the codes of the respective axes into the vehicle type code. For example, when the 4-axis vehicle of the model 124 (shown in FIG. 1) passes, the respective shaft type codes are respectively displayed: 1222; The code of each axis group is displayed: car code: 124 (according to Hebei Province model code).
1.4 Expert System The general expert system consists of five parts: knowledge base, database, inference engine, interpretation part and knowledge acquisition (as shown in Figure 4). The knowledge base is an important part of the expert system. It has a fixed coupling and the first axis of each vehicle must be non-coupling. According to this information and the actual load distribution of the trailer axle, knowledge can be acquired and used as an expert knowledge base. Using the measured information of each axis group as a database, the expert knowledge base is used to infer the currently obtained data to give an explanation and vehicle axis coding. 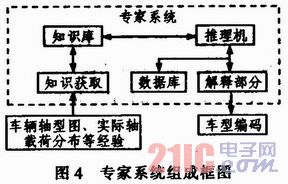
2 Data fusion
2.1 Structure of data fusion The structure of data fusion has three forms: series, parallel and hybrid. Hybrid fusion is adopted in the system, that is, each sensor data transmits its respective data to the sensor fusion center (weighing instrument) in real time according to the identification process, and the system has four data sources, and the observation values ​​at n time are 4n observations, their collection 
The data fusion processing model of the system is shown in Fig. 5(a). The data source 1 in the figure is single/double wheel; the data source 2 is the wheel detector with/without pressure axis; the data source 3 is the weighing platform with/without pressure axis: data Source 4 is an expert system experience. The software implementation process of data fusion is shown in Figure 5(b). 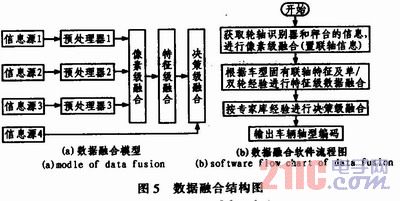
2.2 Data fusion method In this system, data fusion is mainly realized by evidence combination method. The evidence combination method considers that completing a certain intelligent task is to make several possible decisions based on information about a certain aspect of the environment, and multi-sensor data information. To some extent, it reflects the situation in the environment. Therefore, each data is analyzed as supporting degree of support for certain decision-making evidence, and the degree of support of different sensor data is combined, that is, the combination of evidences, and the decision that the most comprehensive support of the existing combined evidence is supported is obtained as the result of information fusion. The axis type recognition system mainly relies on the logic structure and experience to identify. Therefore, the pixel-level fusion result is the main evidence in the specific implementation. The intrinsic coupling evidence in the feature level fusion is analyzed and the evidence combination is made with reference to the expert library experience. The actual shaft type code of the vehicle.
2.3 Software Implementation of Data Fusion Method Because axis recognition is a process with strong real-time and information blending, each function block crosses each other when the actual program is implemented. The data fusion is carried out in the weighing instrument. The corresponding algorithm structure and implementation process are written by using C language by acquiring each data source. The main function codes are as follows: 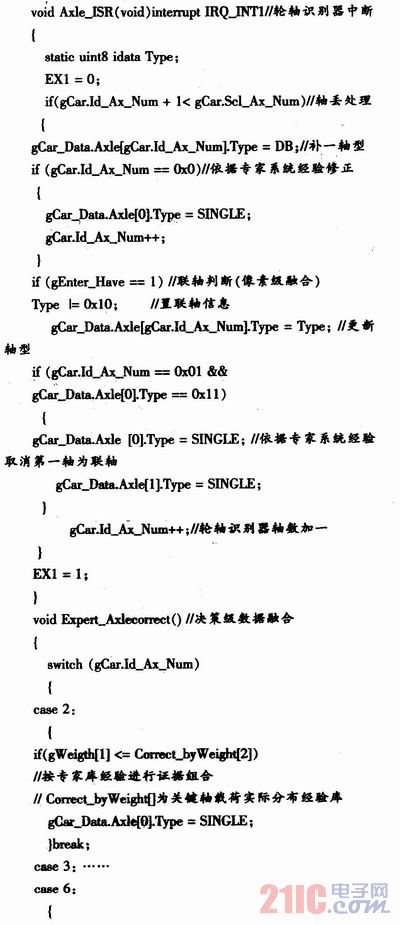
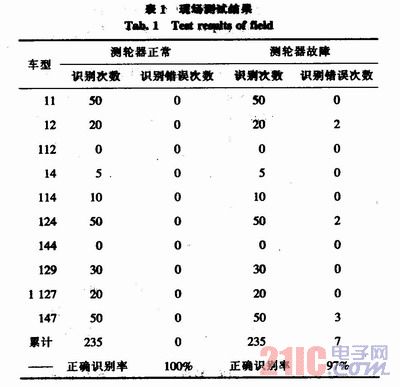
3 Experimental results The system was tested at a weighing station. The test results are shown in Table 1.
4 Conclusion The vehicle shaft type identification system consisting of the weighing instrument and the wheel detector not only has the correct recognition rate of nearly 100% when the parts are in normal operation, but also can be damaged when the pressure sensor of the wheel detector is damaged. Guaranteed correct recognition rate of 97% or more, as shown in Table 1. When the system is damaged and the vehicle approaches the no-load, the system mainly relies on the weight of the shaft for secondary error correction, so there is an error recognition rate of less than 3%. However, since the highway toll system has corresponding regulations on the charging of unloaded vehicles, the misrecognition rate does not affect the actual application value of the system.
The shaft type identification system has high reliability and good operation in the on-site highway weighting and charging system.